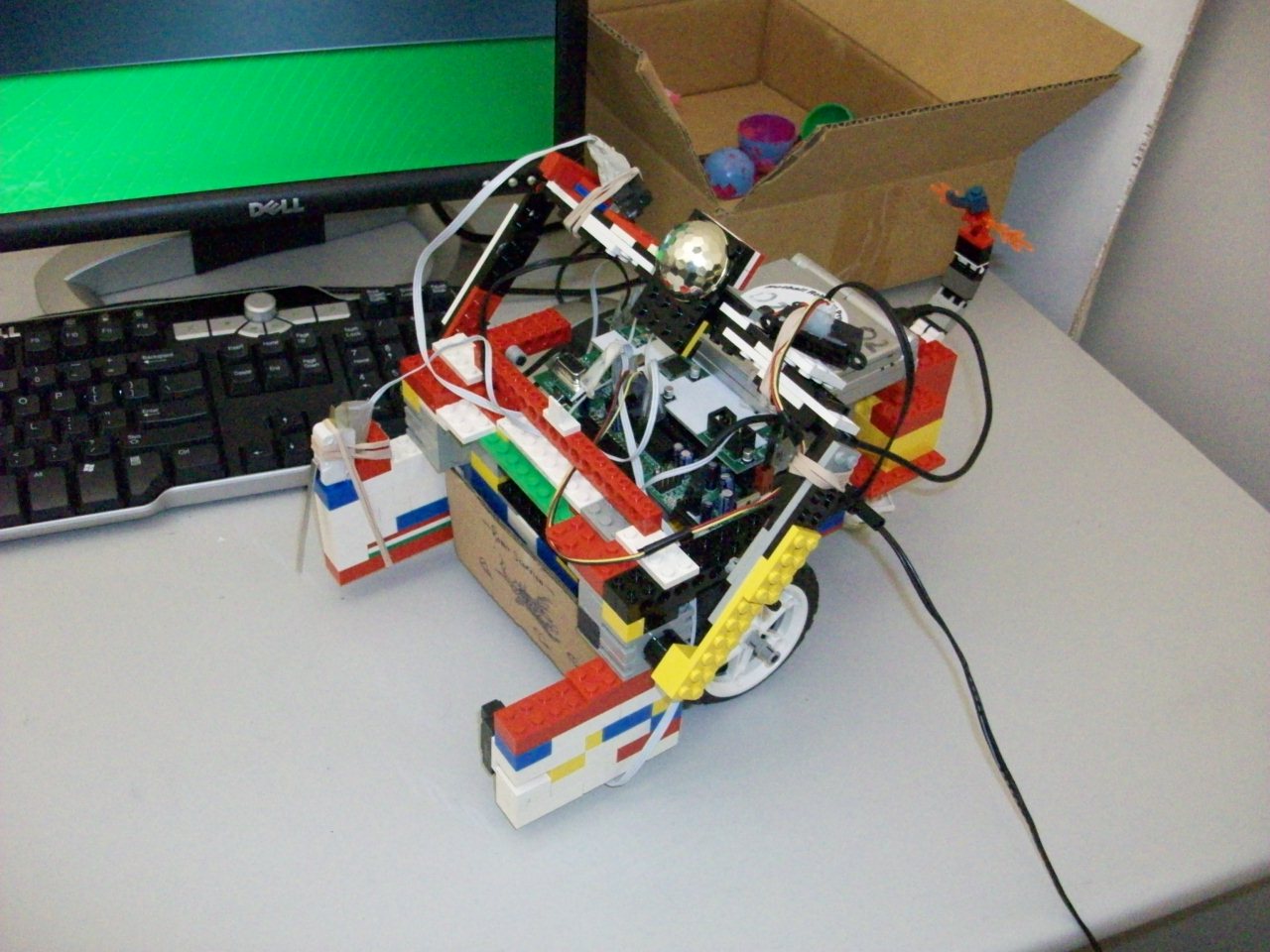
This is an Interactive C file from the final project in my Robotics class, as well as a photograph of our robot, a short video demonstrating its use (my group’s robot starts behind and to the left of the other robot, and scores several goals).
- Basically, we wrote programs in Interactive C, loaded them onto an XBC, which was connected to sensors and motors arranged strategically in the Lego-built body, and the program instructed the robot to act appropriately.
- This project involved our robot using a small camera on the front of it to detect color blobs as it wandered around a PVC pipe arena. The goal was to locate the blue eggs, move toward them, somehow contain them (our robot drops an arm in front), look around to find the correct goal (there are two differently colored goals), move them to the goal, release the egg(s) there, and repeat. Alternatively, the tennis balls are worth negative points, and one could design a robot to find those and put them into the opponent’s goal.
- Two robots were in the arena, each with an assigned goal, at a given time. It was also important to avoid getting stuck on the walls (the PVC pipes) or on the opponent.
- Because this was designed to work with very specific equipment, you won’t be able to test it. I included the photograph and video to help give you a better idea of what my group and I accomplished.
Downloads:
{kind=link}